
Control Systems on Rowandale

A Raspberry-Pi 3B is used to control the routes for
the layout. It is mounted inside the control panel.
This is an amazing little computer, designed and built
in the UK, which uses an ARM 4 core processor and
costing just £30. It has numerous interfaces,
especially the I2C data bus through which a very
large number of remote digital I/O can be controlled.
The view of the inside of the control panel, at right,
shows the R-Pi near the centre. It is partly masked
by a prototyping board fitted with a 5v-3.3v level
shifter, a booster for the remote I2C interfaces out
on the layout and various connectors. At the top left
is the display panel with keypad connector. The
push-buttons are wired as an X-Y matrix driven
directly from I/O on the Raspberry Pi.
To the right of the R-Pi is a 16 channel I2C interface
which drives the LEDs on the control panel.
Several small I2C digital boards (costing just a few
pounds) connect 8 digital I/O to the I2C data bus out
on the layout. All the remote I2C interfaces are
wired in daisy chain fashion with just four wires,
clock, data & two for DC power.

The only direct connection between the control panel
and the layout points servos and track sensors, is a
single 6 way cable, two for power in to the Control
panel and four for the I2C data bus ( 5v, 0v, data &
clock ), thus saving an enormous amount of wiring.
If other sensors or relays, etc. are required on the
layout then all that is required is to add another
cheap I2C interface board and connect its four wires
to the daisy chain of the other interfaces. There is no
need for a monitor, keypad or mouse once the
Raspberry-Pi has been programmed.
Even if program changes are required to the
Rapberry-Pi Route Setting control software, a
keyboard & monitor are still not needed, as full
control of the Raspberry-Pi can be done via a desktop
computer running a Virtual Network Server on your
domestic Wi-Fi network. Free versions of VNC are
available.
The Pololu Servo Controller still implements the actual
route settings, getting a digital track number from the
Raspberry-Pi, via the I2C data bus.
The sensors for the loco indicators on the control panel
are tiny opto-reflective devices fitted between sleepers in
the track; reflective tape on the underside of the locos is
seen by the sensors. As well as relaying the status of the
loco sensors to the control panel LEDs the R-Pi controller
is programmed so that it can, if required by the operator,
automatically hold a train in the hidden sidings, and later
release it, by switching the points.
Control of the speed of the locos is using the
free open-source software JMRI DeCoder-Pro.
The interface to the track is via a USB
connection to a SPROG 3, which in turn
generates the DCC signals for the track.
Decoder-Pro is available for both
Desktop PCs, or laptops, and also for
Linux - which of course will run on a
Raspberry-Pi. This software allows the DCC
parameters for the loco decoders to be adjusted very
easily, with full in-line help for the various settings.
Initially I ran the Decoder_Pro software on a Windows
laptop but now use a second Raspberry-Pi 3B. I did try
using the R-Pi in the control panel to run both my Route
Setting software and DeCoder-Pro, but there was
sometimes a slight delay in response to commands, as
my Route Setting software does quite a lot apart from
setting the routes.
If you already have a laptop, or desktop PC, on
which to run the DeCoder-Pro software then you
only need to buy the SPROG 3. This costs £60,
with 3 Amp drive capacity, plus £20 if you don’t
have a suitable 12V dc power supply. This is
much cheaper than buying a standard DCC
control system, and gives you easier control of
the CVs settings.
I decided to use a Raspberry-Pi 3B instead, as I found
it more convenient, and at £35 still much cheaper than
a dedicated DCC system.
The DeCoder-Pro software does have throttles you can
use on the R-Pi; however this would require a monitor,
keyboard & mouse to be used with the R-Pi, or Wi-Fi
connection to a desktop or laptop computer. I use a
Wi-Fi connection to an Android mobile phone and a
tablet. The free software Engine Driver can be
downloaded to phones and tablets for extremely
convenient wireless throttle control of the locos.


The Raspberry Pi Organisation also produce a minimal version,
the Raspberry Pi-Zero; see photo at right.
On Rowandale, one is used to drive a stepper motor to operate the
turntable. Programmed with the sequences for energising the stepper
motor coils ( via a driver interface ), a single push on the control panel
button, causes the stepper motor to turn the table exactly one half
revolution; with acceleration & deceleration.

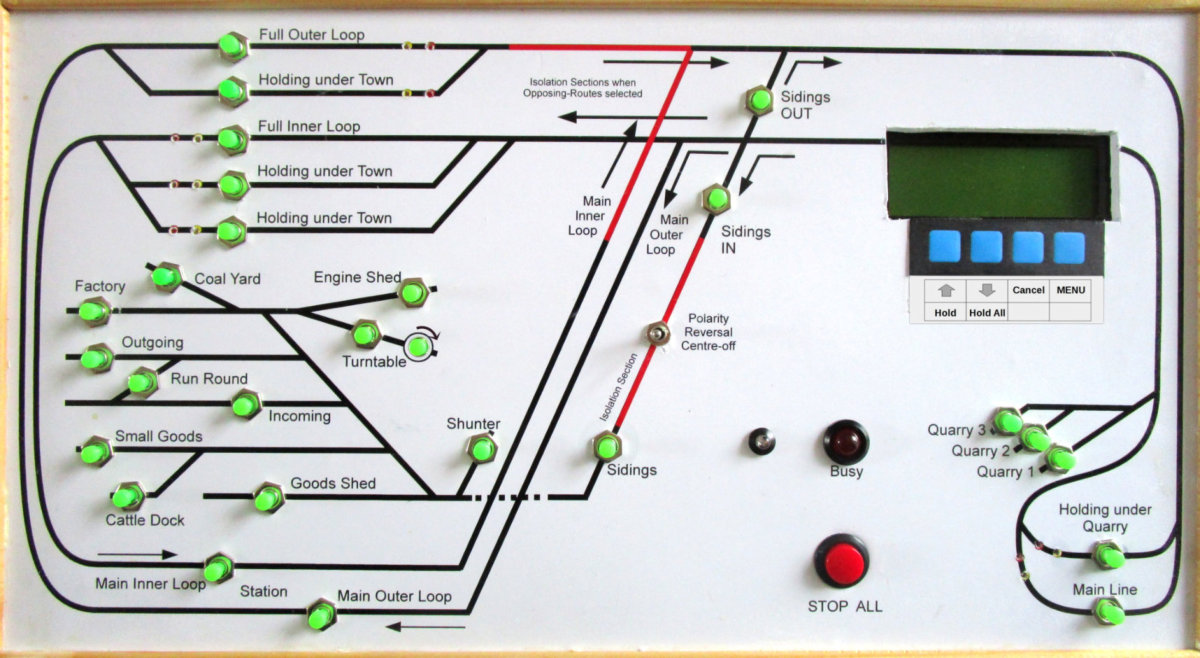
The control & mimic panel is shown below.
It is a shallow wooden box with a rigid plastic front.
The overlay is printed onto gloss photo paper; A3 size.
Route selection push buttons are mounted on the
mimic, together with tiny LEDs which indicated the
position of locos in the hidden holding bays.
To set a route, pressing just the one push-button which
lies on the desired route, will set all the points that are
required to establish that complete route.
There is also a four line by 20 character display screen
which indicates the previous routes that have been set.
The associated keypad, can be used to perform a number
of functions, such as setting the default routes, initiating
train lap timing functions, and train holding features.
It is also used to perform various system tests, such as
checking all the LEDs on the control panel.

The Route Setting software
is described and listed here:
The page also lists the
Pololu Servo Control software
and the Turntable software.

The sensors for the loco indicators on the control
panel are small surface-mount opto-reflective ICs,
which fit between adjacent sleepers in the track.
They are the same depth as the
sleepers and just need a small
shaving taken off the edges of
the sleepers so that they are
snug fit. A very fine tip on the
soldering iron, and a steady
hand, is needed to solder the
fine wires to the small pads on
the underside of the sensors.
The four wires are terminated in a small 4 pin header,
which plugs into a circuit board which limits the
current though the sensor and uses a transistor to
boost the switching capability of the sensor. The
output can then be used to either directly light an LED
on a control panel or, as in Rowandale, connect to an
input on an I2C interface for onward transmission to
the control panel via the I2C data bus.
The sensors are fitted on each hidden track as a pair,
separated by 50mm, just before the associated exit
points. The first sets a yellow LED on the control
panel, and the second a red LED. A section of self
adhesive reflective tape is fitted on the underside of
the locos, as far forward as possible.
The operating principal is that a loco is stopped when
the yellow LED is lit; if the red LED is lit then the loco
is too close to the points and could be hit be a train
exiting the adjacent merging track.





The opto-reflective sensor used is the Kingbright KRC011.
Available from RS Components and other electronic
suppliers, costing about 32p.
Note that the sensors will respond to bright sunlight and to very
bright overhead lights; not a problem with hidden covered tracks, or
normal room light levels, but it is best to perform tests with your
layout. Adjusting the values of R1 & RS may be necessary.






























